Hi everyone,
In my day job I teach electrical engineering technology at Purdue University, but I volunteered as a coach for FIRST® LEGO® League (FLL) teams for 5 years while my son was participating. I became a big fan of FIRST® in general, and FLL in particular. During my time coaching I became aware that a lot of potential coaches and mentors find the robot programming to be the most intimidating part of coaching a team.

When I stopped coaching FLL I wrote a book to help those FLL coaches and mentors:
Programming LEGO® EV3 My Blocks—Teaching Concepts and Preparing for FLL Competition.
This web page and associated YouTube videos are intended to augment the book and provide even more help to coaches, mentors, and their students.
The structure below generally matches the layout of the book. My plan is to do YouTube videos to provide more information for selected topics from the book, but I also expect to be adding topics to the list. If you have a question, would like to see a particular topic sooner than others, or would like to see something about a topic not in the list, please fill out the Contact form and let me know.
Best regards,
Gene L. Harding, aka “Mr. G”
Chapter 1: Concepts and Common Tasks
- My Blocks, or Subroutines
- Feedback
- Troubleshooting
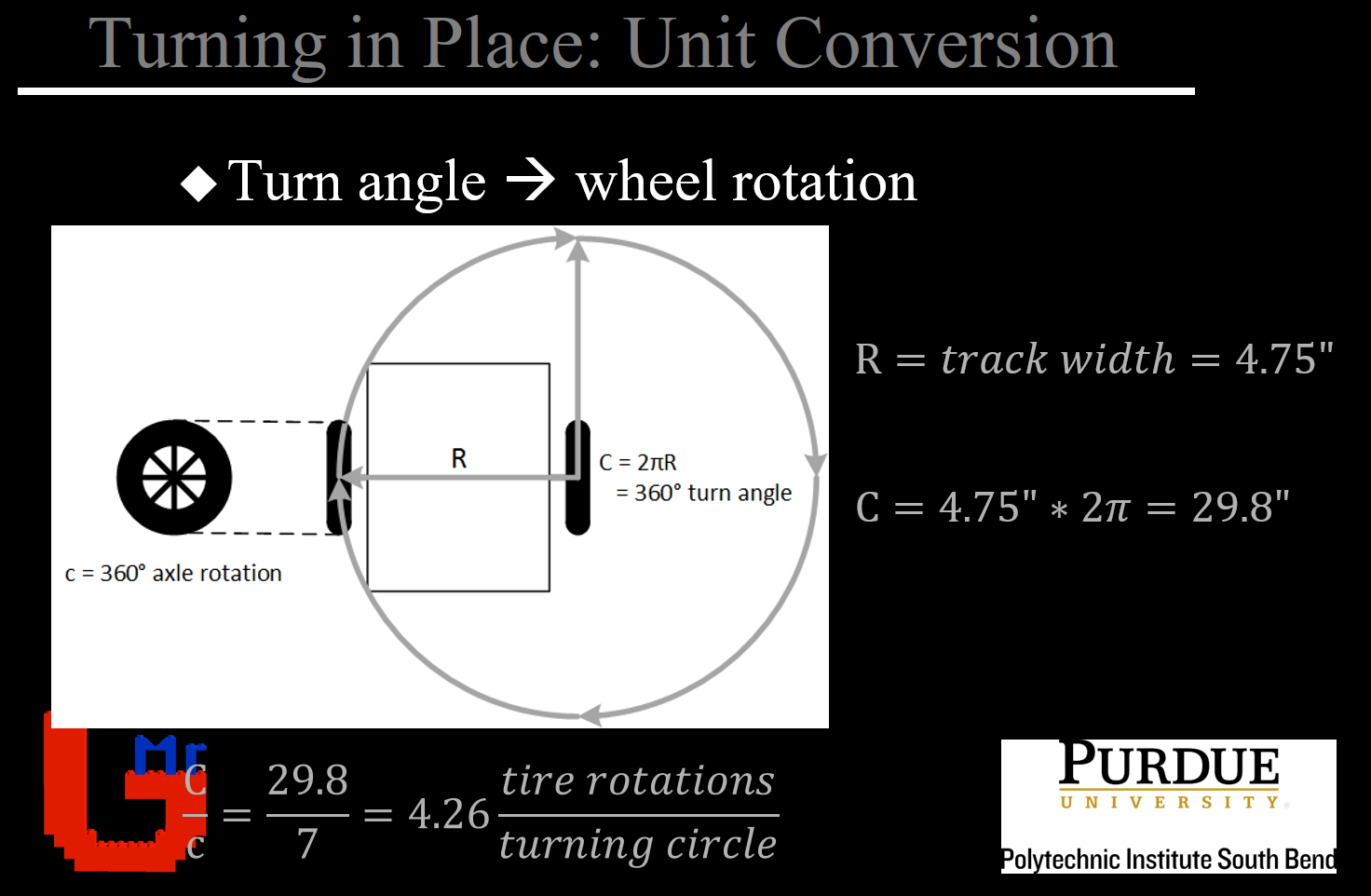
- Unit Conversion
- Motor and Color Sensor Matching
- Levels of Complexity
- Commenting and Program Development
- Errors and Consistency
- Resetting the EV3 Brick
- Updating the Firmware
Chapter 2: Getting Started with the EV3
- Education vs. Home Editions
- The Programming Interface
- Simple Program to Play Sounds and Flash Lights; Run Selected, Download and Run from PC
- Simple Program to Move Forward and Backward; Download from PC, Run from Brick
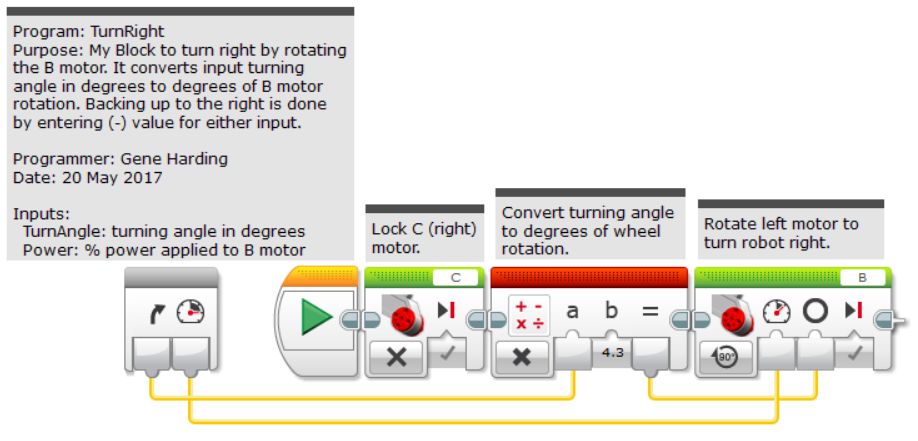
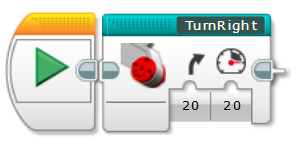
- Making a My Block
- Working in the Project Properties Window
Chapter 3: Moving Forward and Backward
- Simple My Blocks to Move Forward and Backward a Specified Distance
- Eliminating the “Wiggle” Using a Gyro Sensor
Chapter 4: Turning in Place
-
Turning Left and Right
- Spinning Left and Right
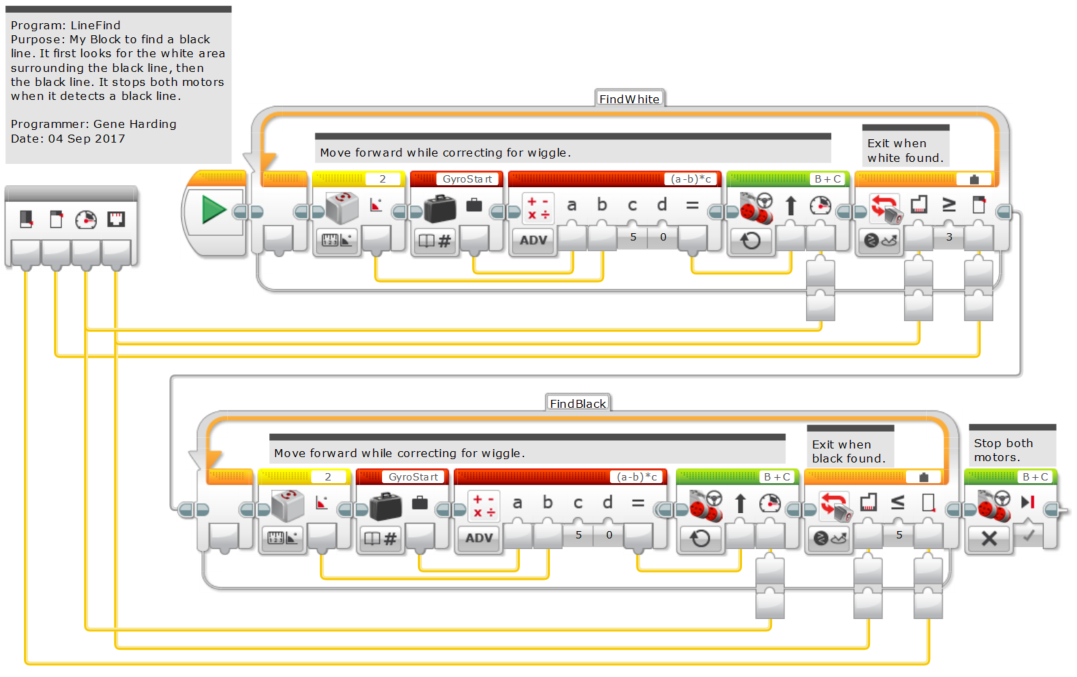
Chapter 5: Using Lines
- About the Color Sensor
- Finding a Black Line
- Following a Black Line
- Finding Black Line Intersections (Ts and Ls)
- Squaring Up on Lines
Chapter 6: Using Walls
- Squaring Up on a Wall
- Following a Wall Without Touching It
- Following a Wall by Leaning Against It
Chapter 7: Advanced Topics
- Handoffs: Continuing at Speed When the My Block Ends
- Accelerating and Decelerating Using Forward3 My Blocks
- Accelerating and Decelerating with a Single My Block
- Adding Handoffs to LineFind
- Combo Program
Chapter 8: Final Thoughts
- Robot Game
- The Judging Rooms
- General Notes