

Have you ever visited a favorite crystal-clear lake or stream from your childhood, only to become heartbroken to find it covered in a slimy film of algae? In addition to making the water look unsightly, the algae produces a cascade of harm to animals, humans and the environment. Fortunately, a Purdue Polytechnic professor and his team are devising a robot to remove algae from waterways.
Harmful algal blooms (HABs) occur as algae and other water-based plants grow unchecked. This growth is often the result of excess nitrogen and phosphorus from sewage and agricultural runoff that enters water system. Rising temperatures from climate change have increased algae growth. The resulting algae is decomposed by microbes, which consume dissolved oxygen, preventing that oxygen from benefiting fish and other underwater life. The oxygen deficit is exacerbated when expanding algae blooms block sunlight. Besides harming wildlife, the deterioration of water quality affects human residents, who use the water system for drinking and bathing. Tourism also suffers, resulting in economic losses for these communities. If the algae is also toxic, contact with the blooms can kill fish, mammals and birds and cause illness to humans.
SMARTBoat 5
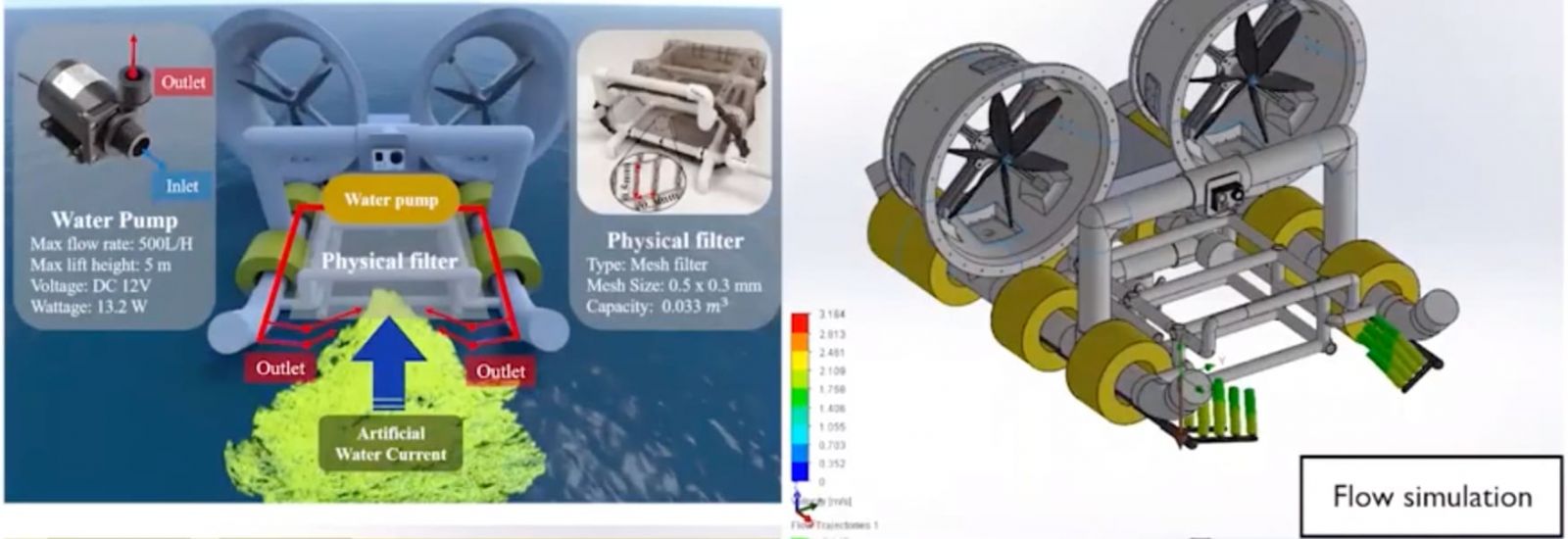
Byung-Cheol “B.C.” Min, associate professor of computer and information technology, is leading a team designing an unmanned surface vehicle (USV) that removes harmful algae blooms from shorelines and waterways. Min and his team developed a hovercraft-type USV, controlled by radio frequency, dubbed SMARTBoat 5, to remove excess amounts of HABs. The vehicle’s lightweight frame was built from 3D-printed parts and can be used in a variety of environments, from small, shallow ponds to large lakes. It is operated by two propellers, with duct fan covers, which, unlike underwater thrusters, do not destroy underwater aquatic ecosystems, allowing the USV to approach shorelines without becoming entangled with plants. The USV is equipped with a water suction mechanism that enables it to collect algae without physical contact. The algae-collecting filter system was designed to be easily disassembled or replaced. The total cost of the USV is approximately $500, which is less expensive than other USV platforms and HABs removal methods.

“It is difficult for traditional surface vehicles to collect HABs near shore areas due to their hardware limitations, such as underwater thrusters and passive collection methods,” said Min. “Our water-suction mechanism collects the HABs without physical contact by generating artificial water current.
“We have a collaboration with the City of West Lafayette to improve our nature and environment. We tested the robot in one of the drainage areas that the City owns, and the test went well,” Min said.
Question: What initiated your interest in solving the algae bloom problem?
“B.C.” Min: I grew up in a city surrounding the sea and I lived in that city for 20 years, and I liked to swim, fish and play in the water. I know how important water quality is, so, after I established my research lab here at Purdue, my graduate students and I explored ways to contribute to water quality improvement by using robotic technologies.
One day, I heard the news that access to lakes and beaches had been banned due to HAB, and on my way to work, I saw that the ponds that I had always passed were covered with algae. Since then, I have become interested in solving the algae bloom problem and I have been thinking a lot about how to develop a low-cost, eco-friendly, effective robotic system to remove HABs and ultimately to improve water quality.
Question: What are your next steps?
Min: Our next steps include improving the performance of SMARTBoat 5, conducting new research attempts to collaborate with SMARTBoat 5 and other robots, and continuing our collaboration with the City of West Lafayette. To improve the performance of SMARTBoat 5, we will conduct research on adding capabilities of autonomous navigation and algae detection using computer vision to SMARTBoat 5. We will also conduct research on how to remove algae more effectively through collaboration with SMARTBoat 5, drones and other unmanned surface vehicles. For example, we will conduct research on a collaboration between SMARTBoat 5 and SMARTBoat 3, which is a hand-held-size USV that our research lab previously developed for robotic water quality measurement. Through this research, we will develop a more practical and effective robot system. Furthermore, we will continue to collaborate with the City of West Lafayette to contribute to improving water quality in the local water system.
The SMARTBoat 5 was presented at a technical conference, 2019 OCEANS Seattle, in October 2019, where Wonse Jo, a graduate research assistant in the Polytechnic’s Dept. of Computer and Information Technology, was selected as a finalist for the student poster competition.
Research on the SMARTBoat 5 was supported in part by the Purdue Research Foundation (PRF) Graduate Fellowship and by the Arequipa Nexus Institute.
Comments
That is impressive. I'd like to ask how often you have to retrieve the craft to remove the algae and change the filter? How long did it take to clean up this patch?