
Neuromorphic systems, often referred to as to as neuromorphic computing or neuromorphic engineering, a is a concept developed by Carver Mead, circa 1989, are hardware systems that aim to use principles of neural function for their basis of operation. Their goal is to harness biologically-inspired concepts such as weighted connections, activation thresholds, short- and long-term potentiation, and inhibition to solve problems in distributed computation.
Compared to today’s methods of emulating neural function in software on conventional von Neumann hardware, neuromorphic systems provide the promise of inherently low power and fault-tolerant operation directly implemented into hardware, for application in distributed and embedded computing tasks where the vast scaling of today’s architectures do not provide a long-term solution.
Neuromorphic engineering is an interdisciplinary subject that takes inspiration from biology, physics, mathematics, computer science, and electronic engineering to design artificial neural systems, such as vision systems, head-eye systems, auditory processors, and autonomous robots, whose physical architecture and design principles are based on those of biological nervous systems [1-5].
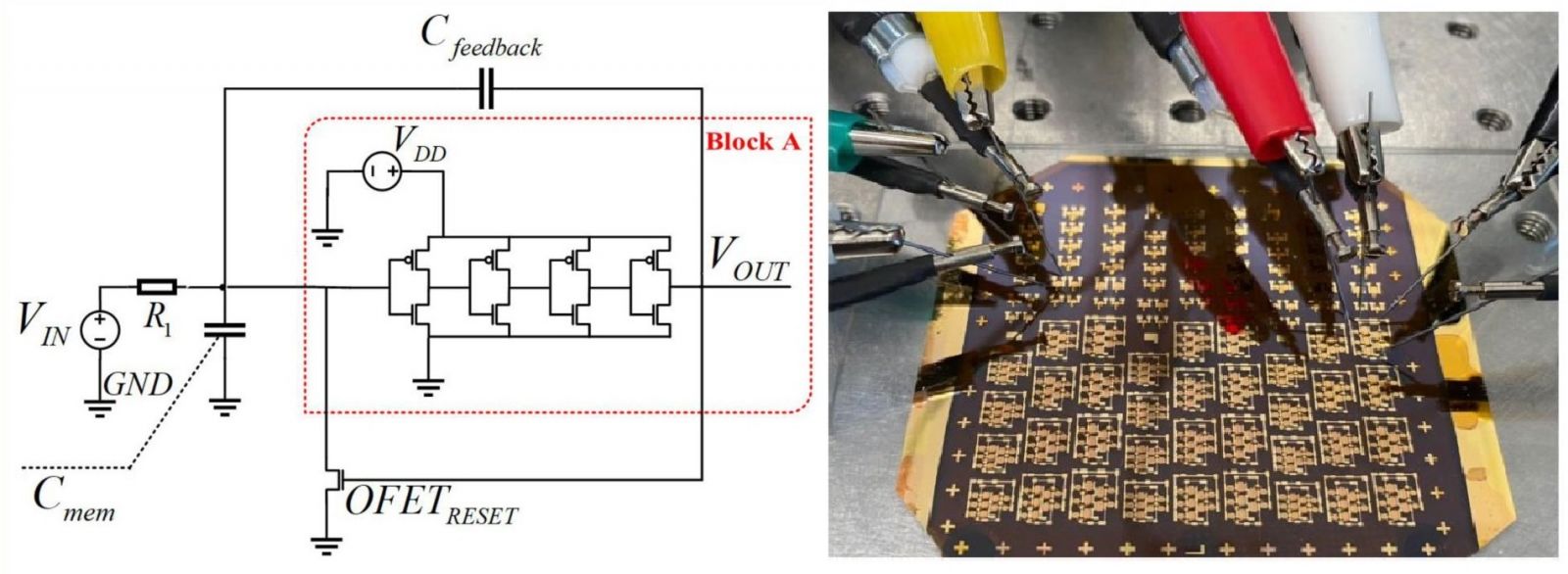
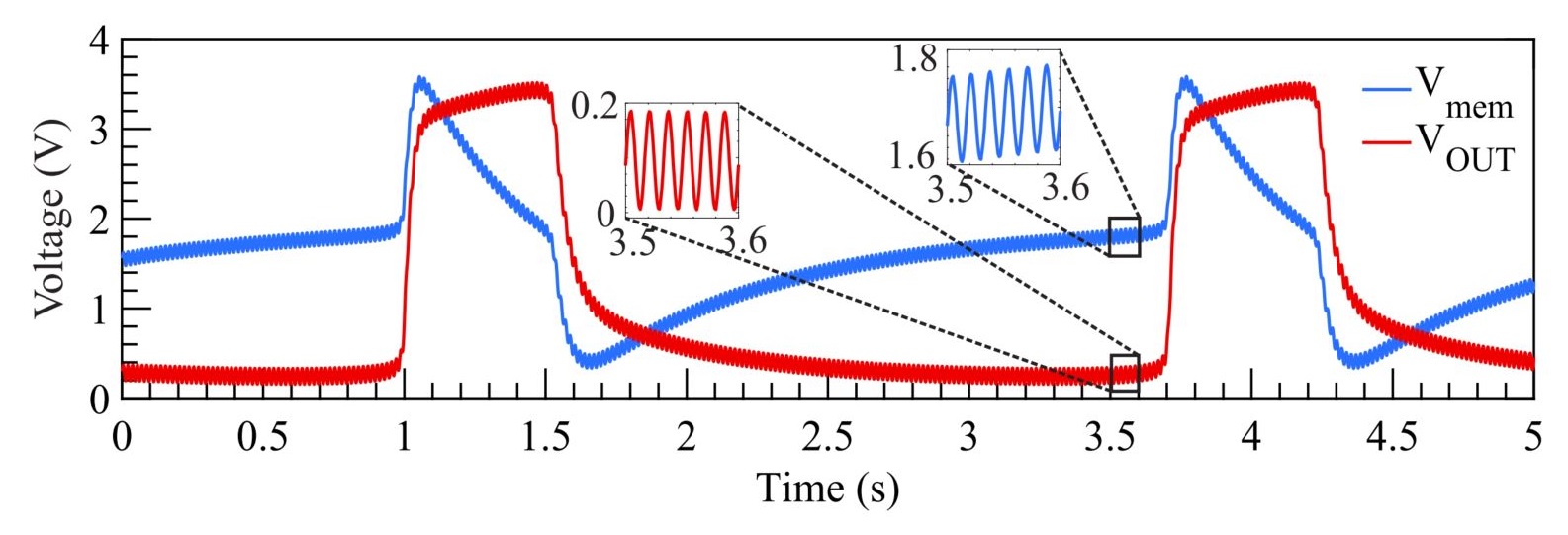
We have fabricated organic neuromorphic circuits that approximate the behavior or a single spiking neuron, paving the way for future brain-machine interfaces [6-7], while taking advantage of the properties of organic materials, including physical flexibility, large area fabrication, biocompatibility, alternative fabrication techniques, such as printing, etc.
A comparison of "conventional" von Neumann (left) and neuromorphic (right) architectures. (a) Boolean AND gate with truth table. (b) Schematic of von Neumann architecture. (c) Graphical representation of the operation of an artificial neuron. (d) Schematic of a basic concept of a neuromorphic architecture. [1]
.jpg)
[1] DOI: 10.1109/TED.2016.2598413
[2] DOI: 10.1109/TED.2014.2346700
[3] DOI: 10.1109/IJCNN.2011.6033256
[4] DOI: 10.1109/IJCNN.2011.6033255
[5] DOI: 10.1115/1.859599.paper59
[6] DOI: 10.1088/1361-6463/abc585
[7] DOI: 10.1002/aelm.202100724