
Adaptive Human Multi-Robot System
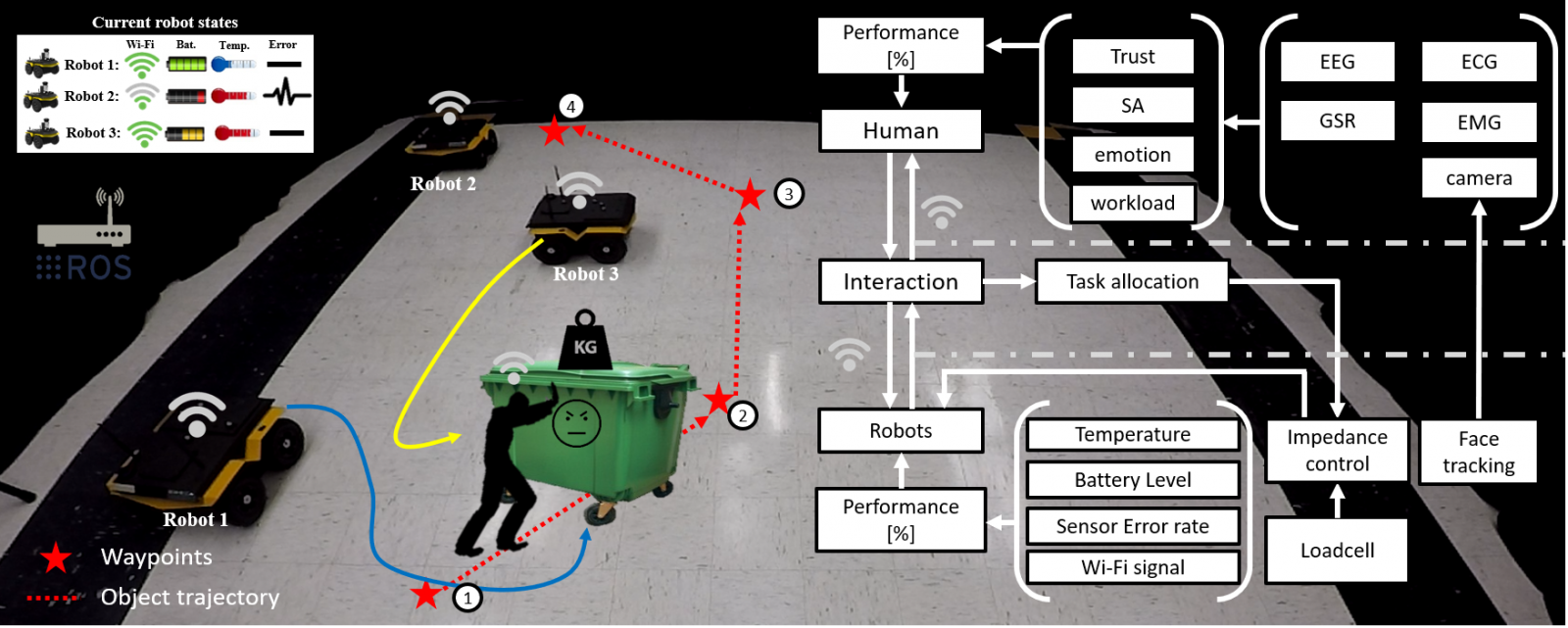
Proposed example of a human multi-robot interaction system
Description: This research is to introduce a new interaction system for a human multi-robot team. Especially, the major goal in the system is to transport an unknown object with a human and multi-robot system. The system will utilize human's emotional and cognitive states in order to compensate each other's drawbacks while interaction. In the scenario, the mission in this system demands that a human transports an unknown object into multiple goal positions by cooperating with robots, where the unknown object is too heavy for a single human to carry it. Also, it has a different weight on the left and right sides. At that time, the multi-robot will differently assist the human depending on human's emotional and cognitive states (e.g., type of emotions, and level of the workload).