
Human-swarm Robot Interaction Platform for STEM Education
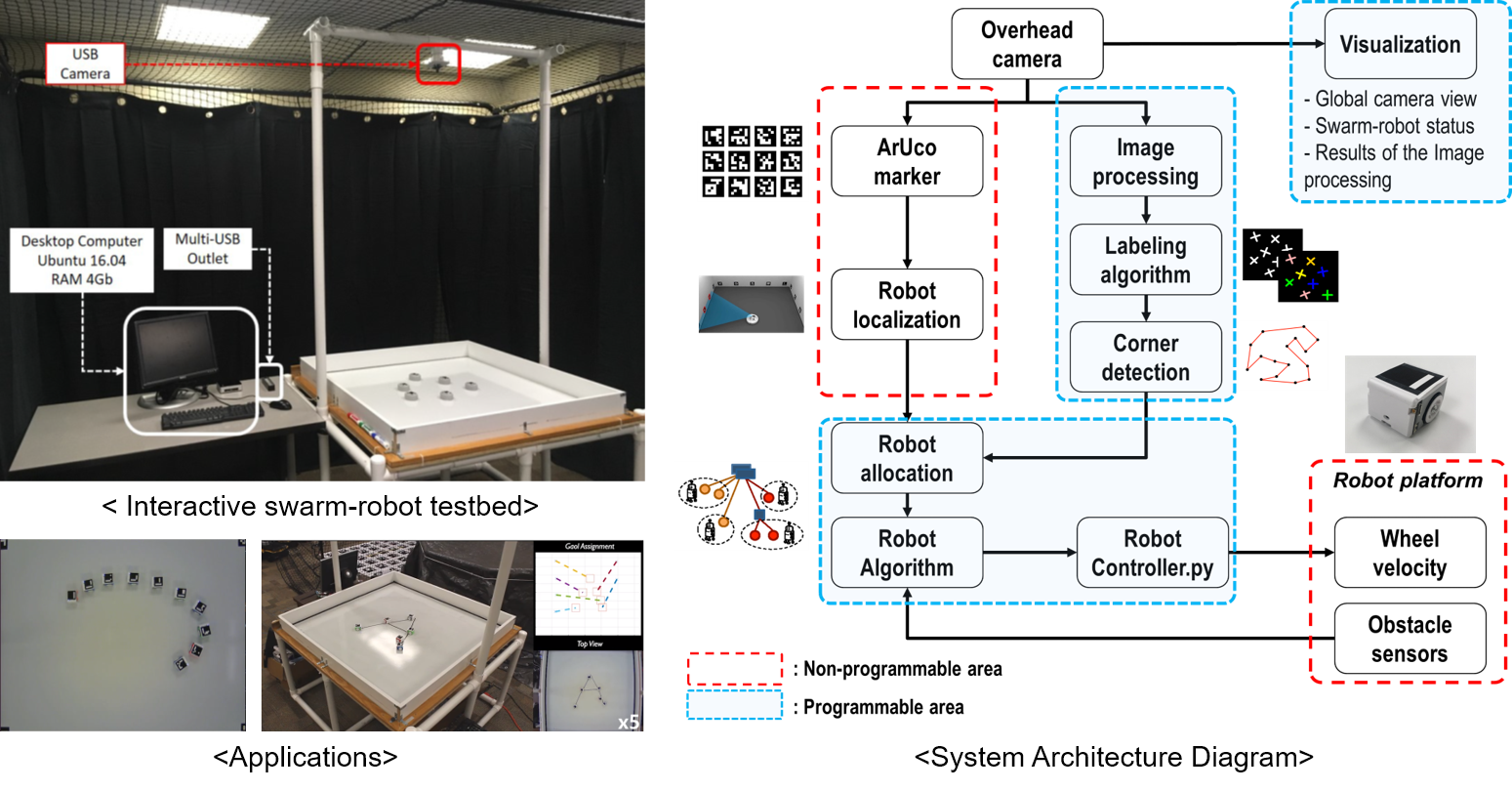
Proposed design of the multi-robot testbed
Description: It is a human-swarm robot interaction platform for K-12 STEM education. The platform is low-cost and open-source from hardware to software; the platform can be easily built with low-cost commercial PVC pipes and off-the-shelf components. This platform provides open-source sample codes for various robot applications including robot localization, swarm robot control, and drawing a letter. By interacting with multiple mobile robots of this platform, K-12 student can learn not only robot programming skills such as python, C, and the Robot Operating System (ROS), but also robot algorithms.
Publications
A Study on the Impact of Movements and Audiovisual Feedback in Swarm Robots on Users
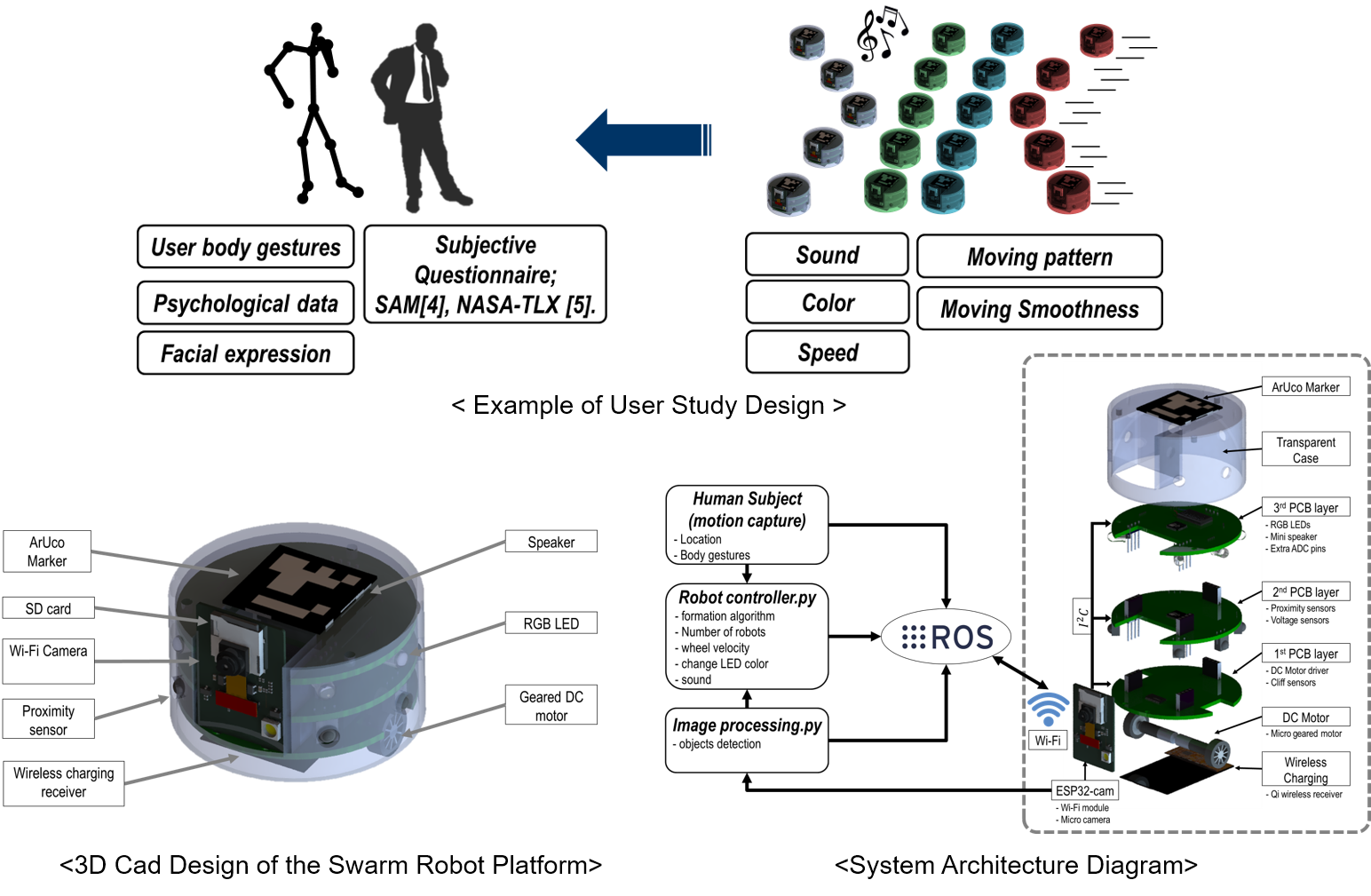
Proposed affective multi-robot system
Description: The long-term goal of this research is to investigate how swarm robots can affect emotional and cognitive states of the human who is interacting with them. As swarm robots are becoming more exposed to the public, it is essential to understand the impact of such robots on human(s). We hypothesize that an appearance (e.g. color) or behavior (e.g. movement) of the swarm robots could cause a positive or negative change in emotional and cognitive states to those who interact with them. As the first step towards this research, we develop a replicable mobile robot platform that can vary its color and sound and form various shapes along with other robots. The robot platform is low-cost, open-source, and small size, and it is expected to be very useful not only in our research on human-swarm interactions, but also for other various researches.
Publications
- Wonse Jo, Jaeeun Kim, and Byung-Cheol Min, "ROS2 Open-Source Swarm Robot Platform: SMARTmBot", 2021 International Conference on Robotics and Automation (ICRA), Workshop on Robot Swarms in the Real World: From Design to Deployment - Live Demonstration, Xi'an, China, May 30 - June 5, 2021. (Video)
Development of Low-Cost, Simplified Humanoid Head
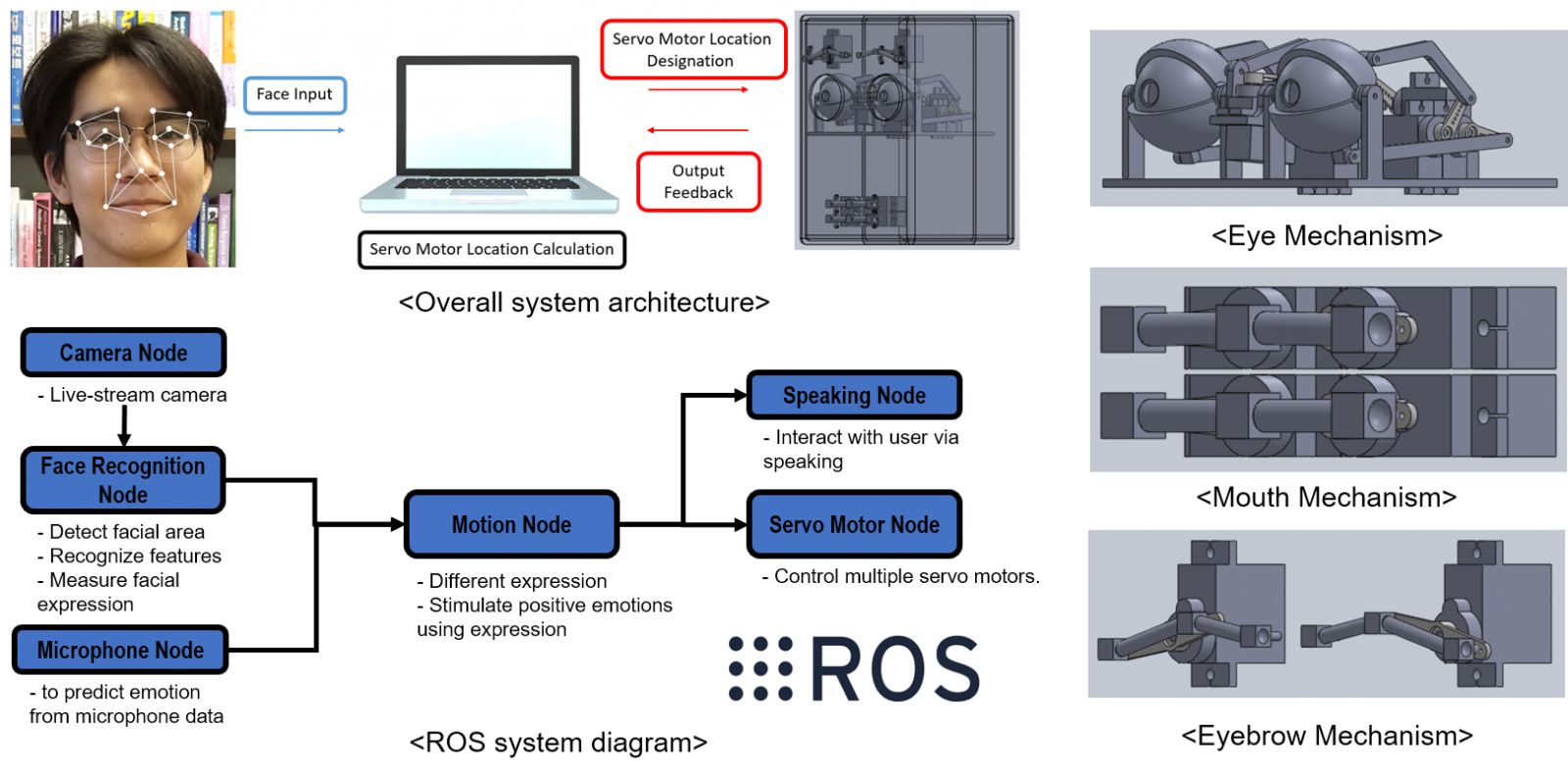
Proposed design of the robot head
Description: This is to present the simplified, affordable version of the humanoid head consisting of off-the-shelf components. The easy setup and manual are developed and provided for the electric and software components for the motors used to control the facial features. Moreover, we expect that the platform will not only help students to study computer programing language (such as C, Python, image processing, and Robot Operating System (ROS)) while controlling the proposed platform, but also learn 3D CAD program to make the platform. In this project, the long-term goal is to correct the user’s emotion to make a positive state while interacting with the proposed robot head. The mounted camera on the platform will measure the user's facial expression, and then the robot head and speak will have different motion and sound based on the detected user’s emotions in order to stimulate positive emotions to the user.
Web-based Adaptive Human-Robot Teleoperation System
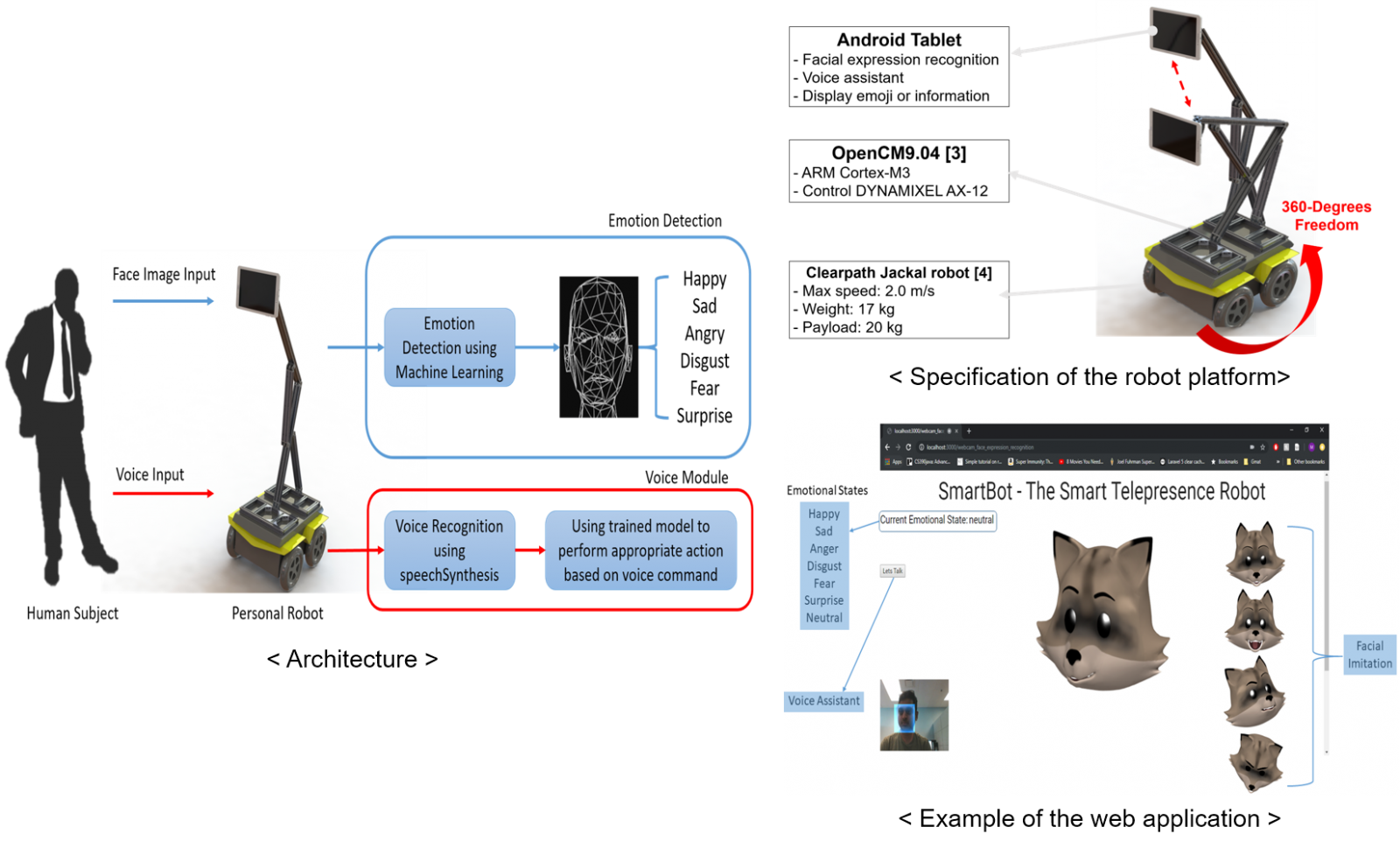
Proposed personal robot affected by user's facial expression
Description: This study introduces a novel personal robot platform to detect and influence human emotion. The goal of the study is two-fold. The first goal of the study is to build a personal robot and application to detect human emotions. The robot is built on top of the Clearpath Jackal UGV robot platform with Samsung S6 tablet. We designed and programmed JavaScript based web application to detect human emotions. The second goal of the study is to identify if the personal robot can influence the emotional state of the human. A pre-test and post-test based comparative study will be used for evaluation.